Example: Simple Tank-Drive Robot: Difference between revisions
Jump to navigation
Jump to search
(Initial work) |
No edit summary |
||
| Line 2: | Line 2: | ||
== Hardware == | == Hardware == | ||
Tank drive robots have only two actuators: A left drive motor and a right drive motor, both attached to a wheel. | Tank drive robots have only two actuators: A left drive motor and a right drive motor, both attached to a wheel. After attaching your power supply to the "+" and "-" pins, it simply requires that two motors be soldered - one each to the M1 and M2 pin pairs on the RoboPad.<gallery mode="slideshow"> | ||
File:Basic 2-Motor wiring diagram.png|Motors are attached to M1 and M2 of the RoboPad in a simple 2-wheel Tank-Drive Robot. | |||
</gallery> | |||
[[File:Basic 2-Motor wiring diagram.png|center|thumb|The required wiring for a simple Tank-Drive Robot.]] | |||
Revision as of 00:50, 21 August 2024
A tank-drive robot is the most simple type of robot that you can make with a RoboPad. It is the default configuration that the roboPad is set up for and allows for driving two motors using two sliding sticks (Sliders) - one to control power to the left motor and one to control power to the right motor.
Hardware
Tank drive robots have only two actuators: A left drive motor and a right drive motor, both attached to a wheel. After attaching your power supply to the "+" and "-" pins, it simply requires that two motors be soldered - one each to the M1 and M2 pin pairs on the RoboPad.
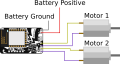
Motors are attached to M1 and M2 of the RoboPad in a simple 2-wheel Tank-Drive Robot.
