File:Non-Armable Configuration.png: Difference between revisions
Jump to navigation
Jump to search
No edit summary |
(No difference)
|
{kind=link}
{kind=link}
Latest revision as of 01:26, 21 August 2024
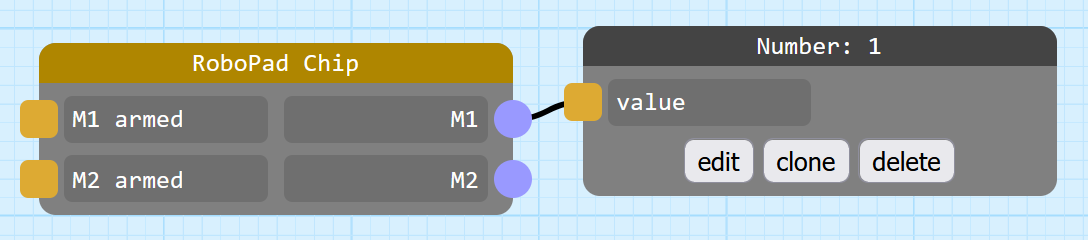
A potentially unsafe RoboPad configuration that is intended to cause the M1 motor to continually drive forward on launch. However, as M1 is a H-Bridge motor, it will never be armed as it requires the value "0.5" to be passed to it first, so the unsafe situation is avoided.
File history
Click on a date/time to view the file as it appeared at that time.
| Date/Time | Thumbnail | Dimensions | User | Comment | |
|---|---|---|---|---|---|
| current | 01:26, 21 August 2024 | 1,088 × 240 (24 KB) | Blayze (talk | contribs) |
{kind=link}
You cannot overwrite this file.
File usage
The following page uses this file:
{kind=link}