Example: Simple Tank-Drive Robot
Jump to navigation
Jump to search
A tank-drive robot is the most simple type of robot that you can make with a RoboPad. It is the default configuration that the roboPad is set up for and allows for driving two motors using two sliding sticks (Sliders) - one to control power to the left motor and one to control power to the right motor.
Hardware
Tank drive robots have only two actuators: A left drive motor and a right drive motor, both attached to a wheel. After attaching your power supply to the "+" and "-" pins, it simply requires that two motors be soldered - one each to the M1 and M2 pin pairs on the RoboPad.
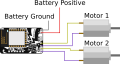
Motors are attached to M1 and M2 of the RoboPad in a simple 2-wheel Tank-Drive Robot.
